 مکاشاپ
مکاشاپ
مکاشاپ
مکاشاپ
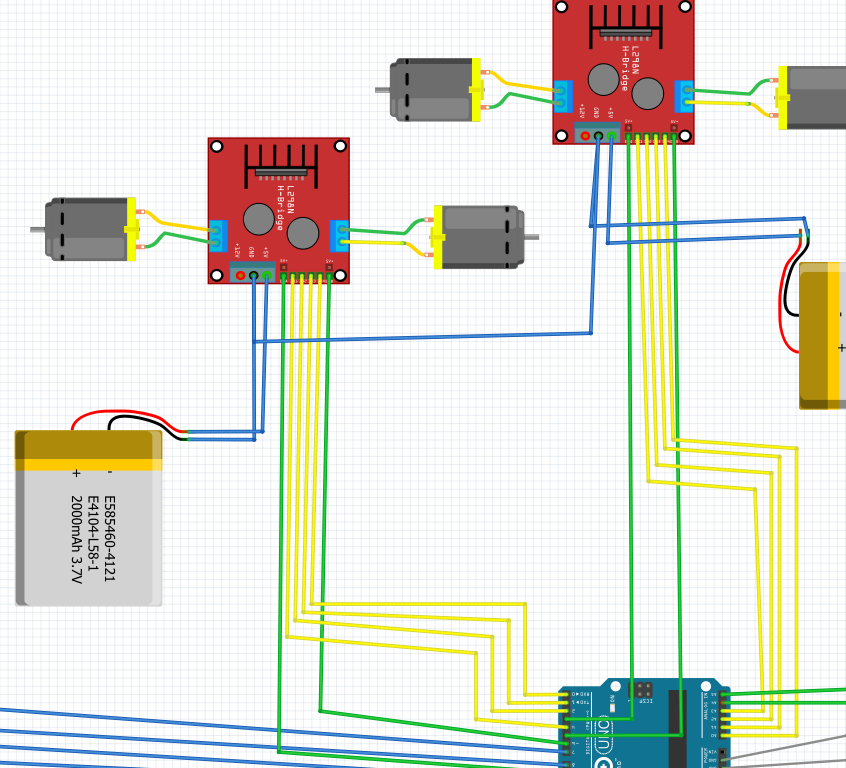
درایور موتور و باز هم درایور موتور، هر درایوری ویژگیهای منحصر به فرد خود را دارد. پیش از این راه اندازی موتورهای مختلف با درایورهای متنوع را در دیجی اسپارک منتشر کردهایم. اما یکی از درایور موتورهای ساده و ارزان قیمت، که مورد توجه دانش آموزان و دانشجوها میباشد. درایور موتور L298N میباشد. تراشه این درایور خیلی قدرت و پتانسیل مناسبی ندارد. صرفا یک درایور جهت راه اندازی موتورهای ارزان قیمت و ساده است. از اینرو انتظار خیلی زیادی از این درایور نداشته باشید. در ادامه این مجموعه آموزش با مرجع تخصصی آردوینو به زبان فارسی، دیجی اسپارک همراه باشید.
آردوینو مشاهده
سنسورهای نوری بر اساس انتشار پرتو نور (مرئی یا مادون قرمز) از یک فرستنده و دریافت نور توسط گیرنده نور کار میکنند. نوع انعکاسی سنسورهای نوری براساس برخورد نور به یک هدف و انعکاس آن به گیرنده عمل کرده و نوع دیگر این سنسورها براساس تابش مستقیم از یک گیرنده به فرستنده که در سوی مقابل قرار گرفته است عمل میکنند.
آردوینو مشاهدهبرای خواندن و نوشتن از پایه های دیجیتال در اردینو از دستور digitalWrite و digitalRead استفاده می شود. که در اردینو مدل uno از پایه ی 0 تا 13 به عنوان ورودی و خروجی دیجیتال در نظر گرفته شده اند. حالا اگر پایه کم آوردیم میتوانیم از پایه های آنالوگ نیز استفاده کنیم. بهصورت زیر: پایه های آنالوگ روی اردینو از شماره A0 – A5 هستند که برای استفاده در تابع pinmode باید از شماره 14-19استفاده کنیم. بقیه دستورات مثل استفاده از پایه های دیجیتال می باشد. توضیحات بیشتر در لینک زیر: http://dmf313.ir/%d8%a2%d9%85%d9%88%d8%b2%d8%b4-%d8%ac%d8%a7%d9%85%d8%b9-%d8%a2%d8%b1%d8%af%d9%88%db%8c%d9%86%d9%88-%d8%ac%d9%84%d8%b3%d9%87-%db%b1%db%b5-%da%a9%d9%85%d8%a8%d9%88%d8%af-%d9%be%d8%a7%db%8c%d9%87/ http://dmf313.ir/%d8%a2%d9%85%d9%88%d8%b2%d8%b4-%d8%ac%d8%a7%d9%85%d8%b9-%d8%a2%d8%b1%d8%af%d9%88%db%8c%d9%86%d9%88-%d8%ac%d9%84%d8%b3%d9%87-1/
آردوینو مشاهده
اساس کار ماژول های آلتراسونیک: این ماژول امواج صوتی با فرکانس بالا ایجاد میکنند و موج بازتاب شده را دریافت و تحلیل میکنند. این ماژول با محاسبهٔ زمان بین فرستادن سیگنال و گرفتن بازتاب، فاصلهٔ جسم را محاسبه میکنند. تفاوت ماژول آلتراسونیک SRF05 و SR04: این دو ماژول در بسیاری از ویژگی ها مشابه هم هستند ماژول SRF05 در واقع تکمیل شده و اصلاح شده ماژول SR04 می باشد. پایه ها و نوع طراحی این ماژول ها به طوری است که می توان با یک برنامه از هر دو ماژول استفاده کرد در زیر تصویر هر دو ماژول را می بینید. همان طور که […]
آردوینو مشاهدهتقویت کننده های عملیاتی، تقویت کننده های کوپل مستقیم بوده، که دارای گین (Gian) خیلی زیادی می باشند. که مقدار این گین را با کمک مقاومت فیدبک می توان کنترل نمود. نمونه ای از تقویت کننده های عملیاتی این تقویت کننده ها اکثراً در مدارات خطی بکار می روند و اغلب در مدارات غیرخطی نیز از آنها استفاده می شود. یک تقویت کننده عملیاتی ایده آل بایستی شرایط زیر را دارا باشد. 1) مقاومت ورودی آن بی نهایت باشد (Ri= ∞). 2) مقاومت خروجی آن صفر باشد (Ro= O). 3) گین ولتاژ حلقه باز آن بی نهایت باشد (Av= -∞). […]
آردوینو. اتوماسیون و کنترل. الکترونیک و میکروکنترلر مشاهدهآردوینو ابزاری است برای تولید کامپیوترهایی که نسبت به کامپیوتر شخصی شما، مقدار بیشتری از دنیای فیزیکی را احساس و کنترل می کنند. این ابزار، یک پلت فرم محاسباتی فیزیکی open-source است که بر اساس یک برد میکروکنترلر ساده تهیه شده، و نیز یک محیط توسعه برای نوشتن نرم افزار جهت کار با برد می باشد. آردوینو می تواند جهت ایجاد اشیای تعاملی، گرفتن ورودی از تعداد زیادی سوییچ و حسگر، و کنترل تنوعی از لامپ ها، موتورها، و سایر خروجی های فیزیکی به کار گرفته شود. پروژه های آردوینو می توانند مستقل باشند، و یا با نرم افزاری که روی […]
آردوینو مشاهدهآغاز کار با Arduino روی سیستم عامل ویندوز این مطلب شرح می دهد که چطور برد آردوینو را به کامپیوتر متصل کرده و اولین برنامه آردوینو خود را آپلود کنید. یک برد آردوینو و یک کابل USB تهیه کنید. محیط برنامه نویسی آردوینو را دانلود نمایید. برد را متصل کنید. نرم افزارهای راه انداز را نصب کنید. یک برنامه کاربردی آردوینو را آغاز کنید. مثال Blink را باز کنید. برد خود را انتخاب نمایید. پورت سریال خود را انتخاب کنید. برنامه را آپلود کنید. 1 یک برد آردوینو و کابل USB تهیه کنید. در این مرجع آموزشی، فرض […]
آردوینو. الکترونیک و میکروکنترلر مشاهدهمحیط برنامه نویسی آردوینو محیط برنامه نویسی آردوینو شامل یک ویرایشگر متنی جهت نوشتن کد، یک ناحیه پیام، یک کنسول متن، یک جعبه ابزار با دکمه هایی جهت عملیات مشترک، و یک سری منو می باشد. این محیط به سخت افزار آردوینو متصل می شود تا برنامه ها را آپلود کرده و با آنها ارتباط برقرار کند. نوشتن برنامه های آردوینو نرم افزاری که با استفاده از آردوینو نوشته می شود، اسکچ خوانده می شود. این اسکچ ها در ویرایشگر متن نوشته می شوند و با پسوند .ino ذخیره می شوند. این مسئله قابلیت هایی را برای cut/paste و […]
آردوینو مشاهدهکنترل کننده OpenCM9.04 کنترلر OpenCM9.04 یک پردازنده open source ارزان قیمت است که برمبنای پردازشگر ۳۲ بیتی STM32F103CB از سری ARM Cortex-M3، با سرعت 72Mhz ساخته شده است. به کمک نرم افزار برنامهنویسی این کنترلر که محیطی شبیه محیط برنامهنویسی Arduino دارد میتوان با زبانهای پیشرفته C و ++C با موتورهای Dynamixel نوع TTL و سایر سنسورها و تجهیزات ارتباط برقرار نمود و آنها را کنترل نمود. همچنین برنامهریزی این کنترلر به وسیله کابل USB امکانپذیر است. راهنمای کاربر فایلهای متن باز
آردوینو مشاهدهموضوع : آموزش جامع برنامه ریزی و راه اندازی بردهای میکروکنترلری آردینو گردآوری : ابراهیم شهنازی اریسمانی استاد : آقای دکتر محلوجی رشته : کارشناسی ارشد مهندسی مکاترونیک دانشگاه : آزاد اسلامی واحد کاشان نوع فایل: pdf زبان : فارسی تعداد صفحات: 81صفحه حجم : 1184 KB دانلود
آردوینو مشاهده